一、软件介绍
RealityCapture:
RealityCapture: Mapping and 3D Modeling Photogrammetry Software - CapturingReality.com
RealityCapture is the state-of-the-art photogrammetry software solution that is changing the industry.
It is currently the fastest solution on the market, which brings effectivity to your work and allows you to focus on your targets.
Create virtual reality scenes, textured 3D meshes, orthographic projections, geo-referenced maps and much more from images and/or laser scans completely automatically.
二、重建步骤

WORKFLOW->Add imagery->Inputs/Folder 添加用于三维重建的图片。(必选)
通过WORKFLOW->Import & Metadata从外部导入激光扫描、光照、地理位置等信息辅助建模。(可选)
通过ALIGNMENT设置相机参数、比例尺等详细信息(有默认值)。(可选)

Align Images获得点云模型。(必选)
通过RECONSTRUCTION进行进一步重建(WORKFLOW->Process中有常用选项)。(必选)

通过Export将模型导出为需要形式。(必选)
三、重建结果
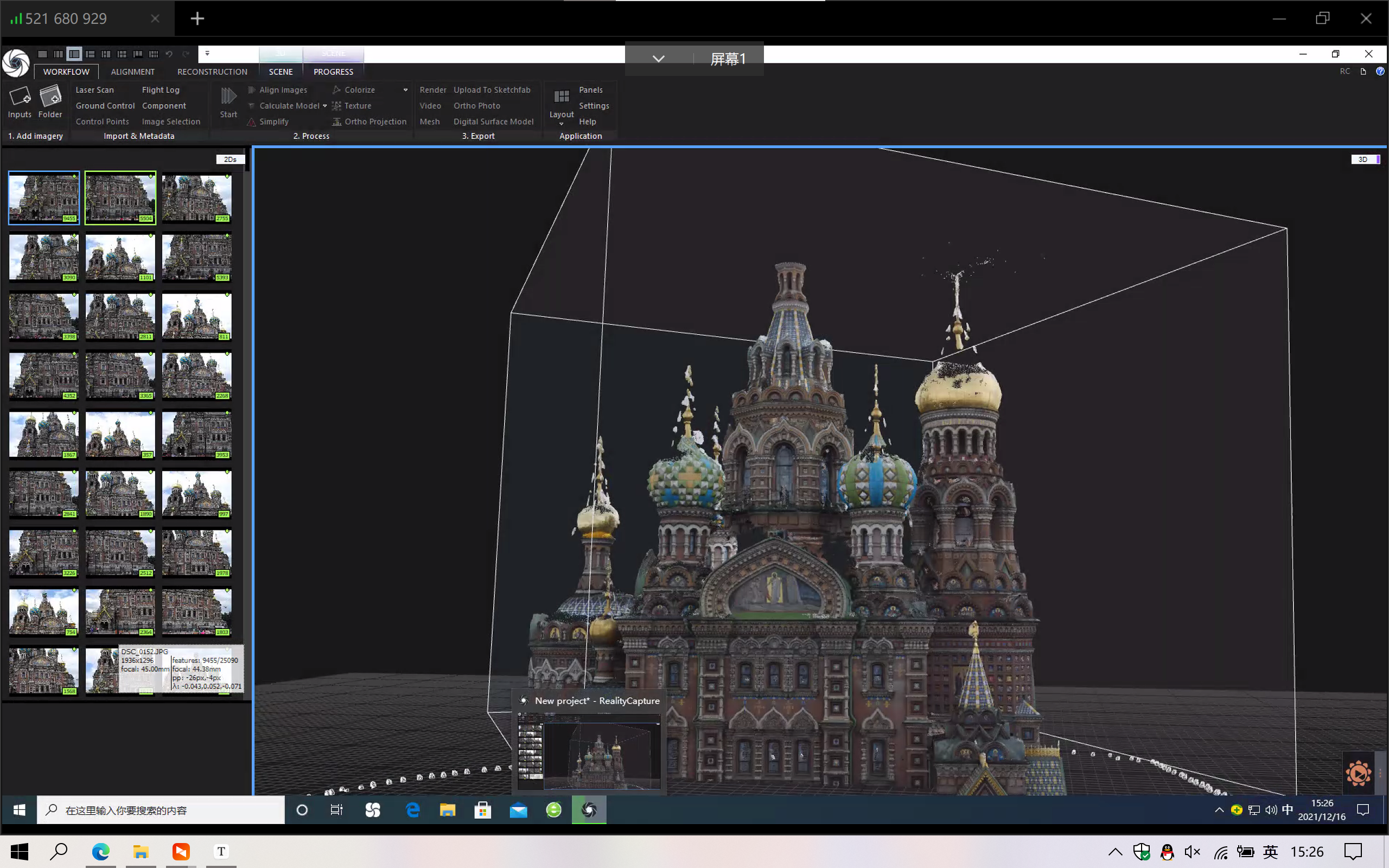
Align Images
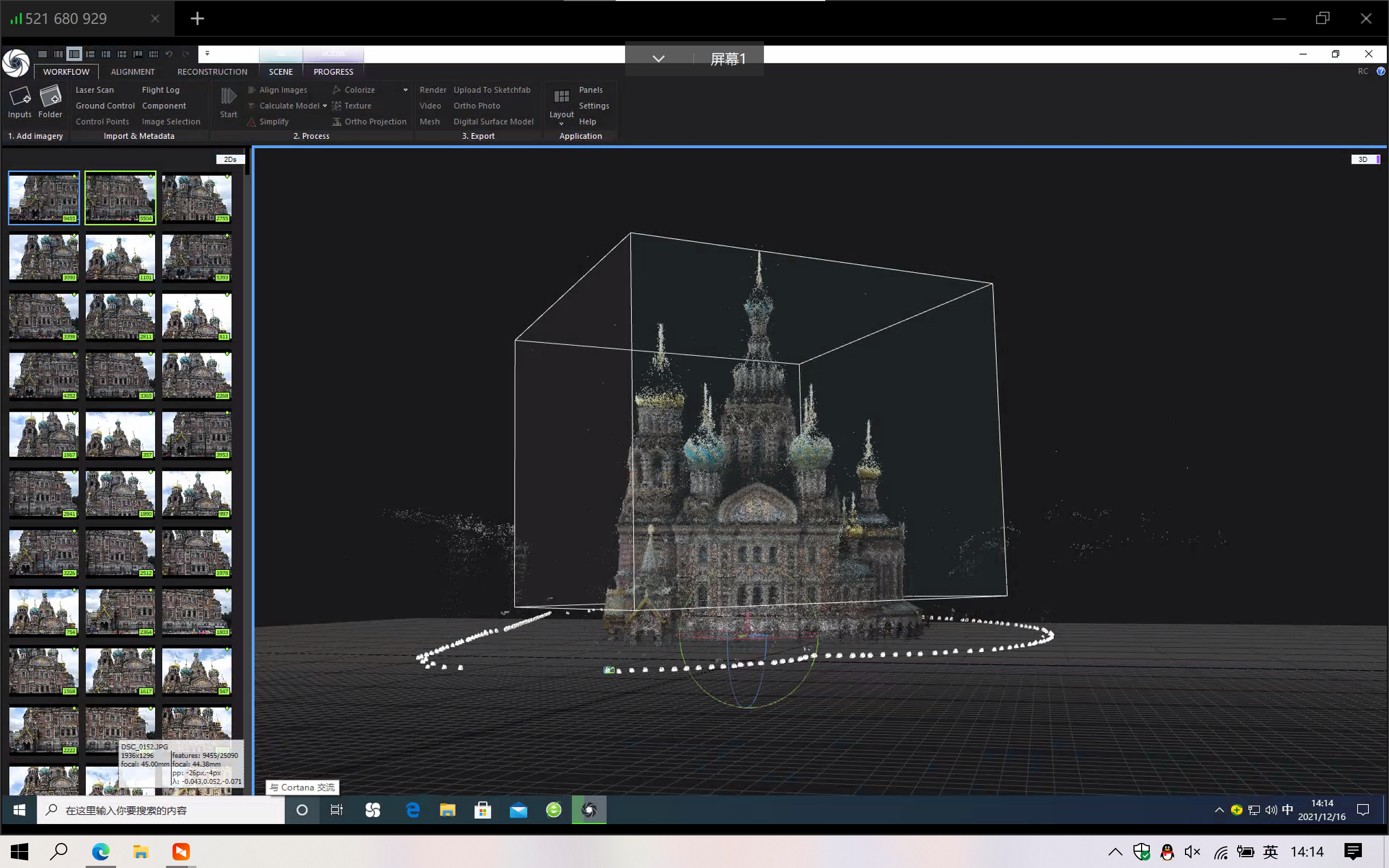
综合考虑所有图片进行稀疏重建,获得点云模型,轮廓与原图大致相似。
Normal Detail
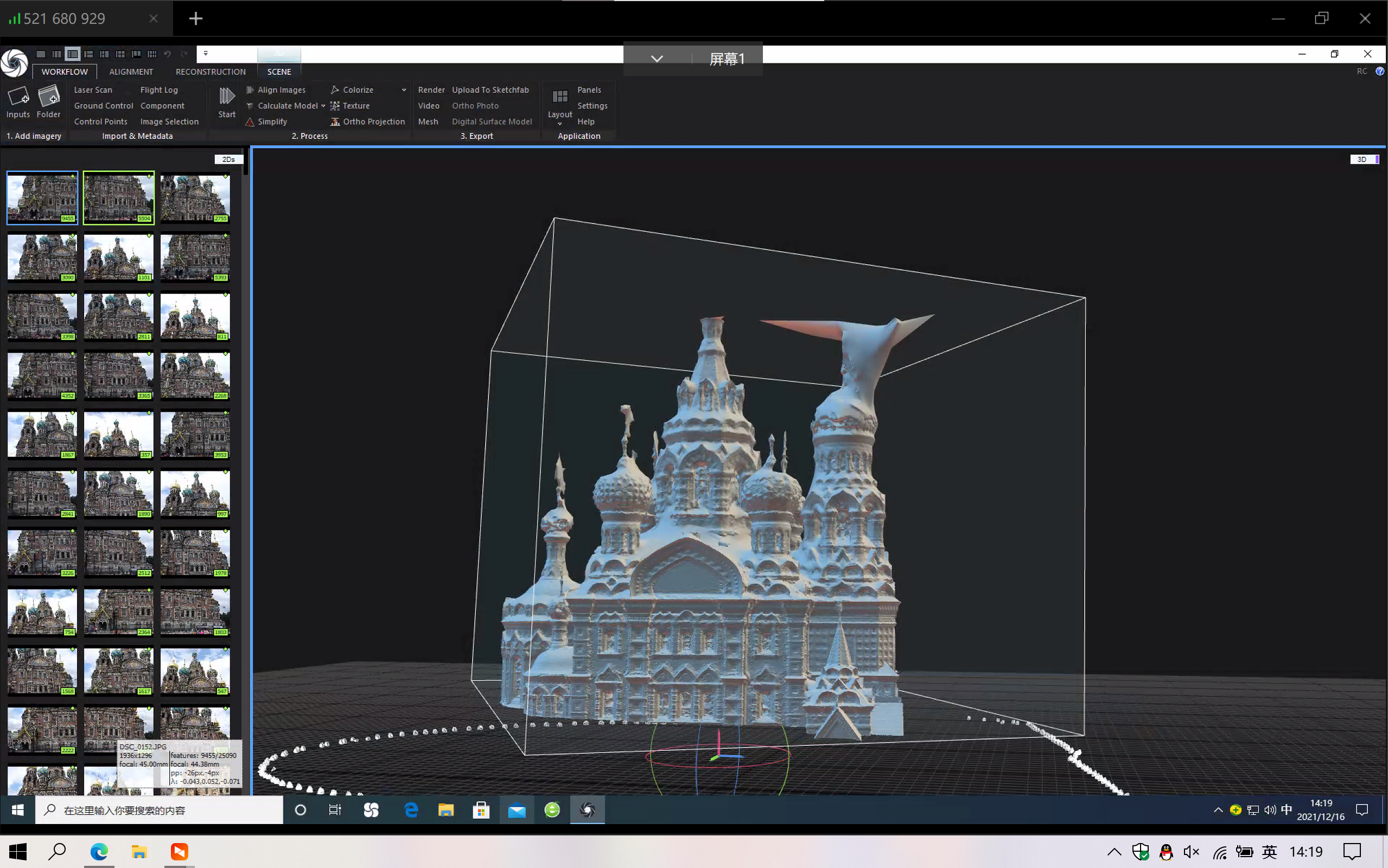
初步渲染后的模型结构基本确定,但上图最右侧塔尖处出现大片连结。(中央塔尖消失不见是因为塔尖超出框选的区域范围)
Colorize
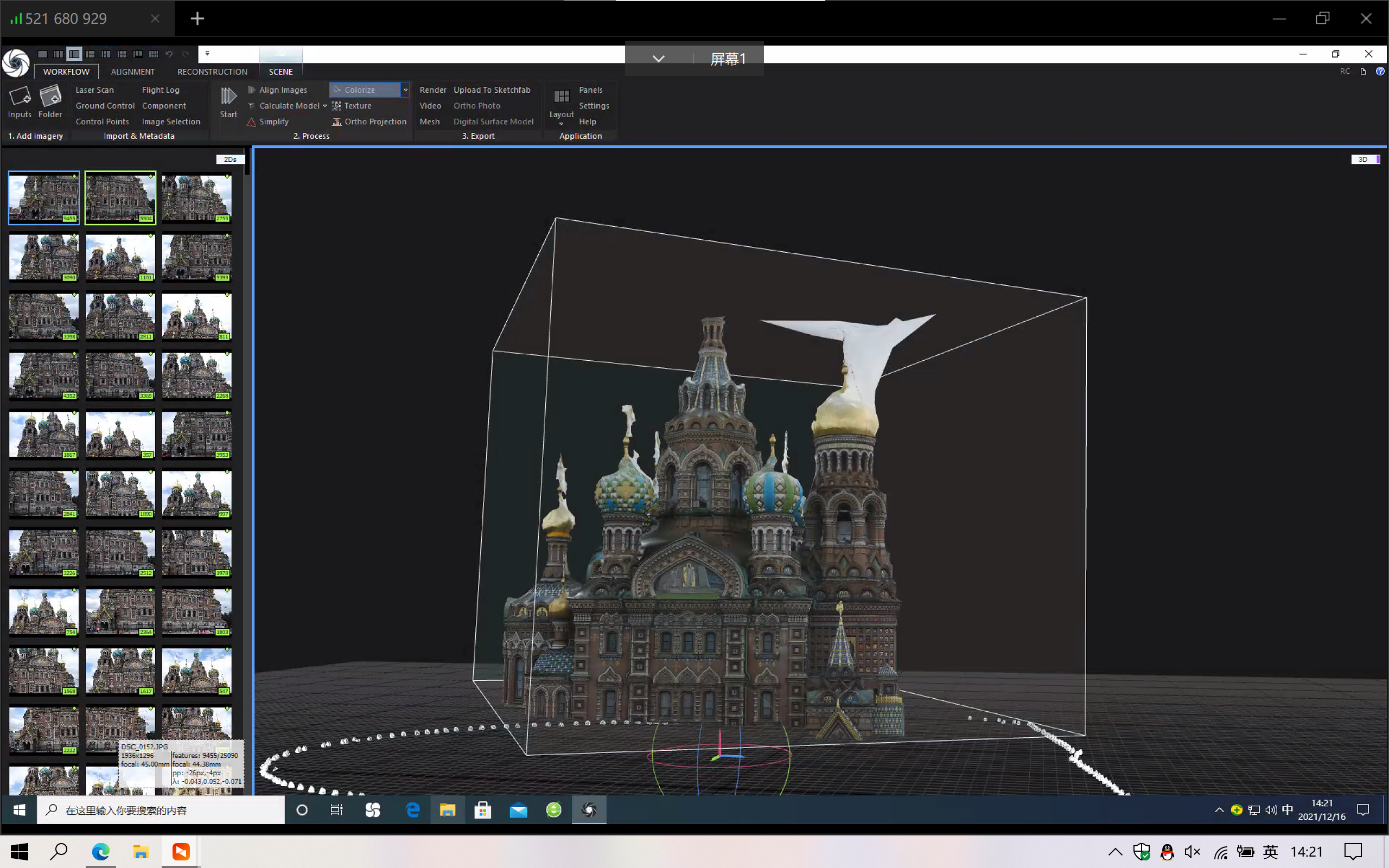
着色后可以看到最右侧塔尖处的大片连结为白色,结合晴朗的拍摄环境,分析极有可能是天空中的白云造成的干扰,也有可能是塔尖反光造成的影响。
Texture
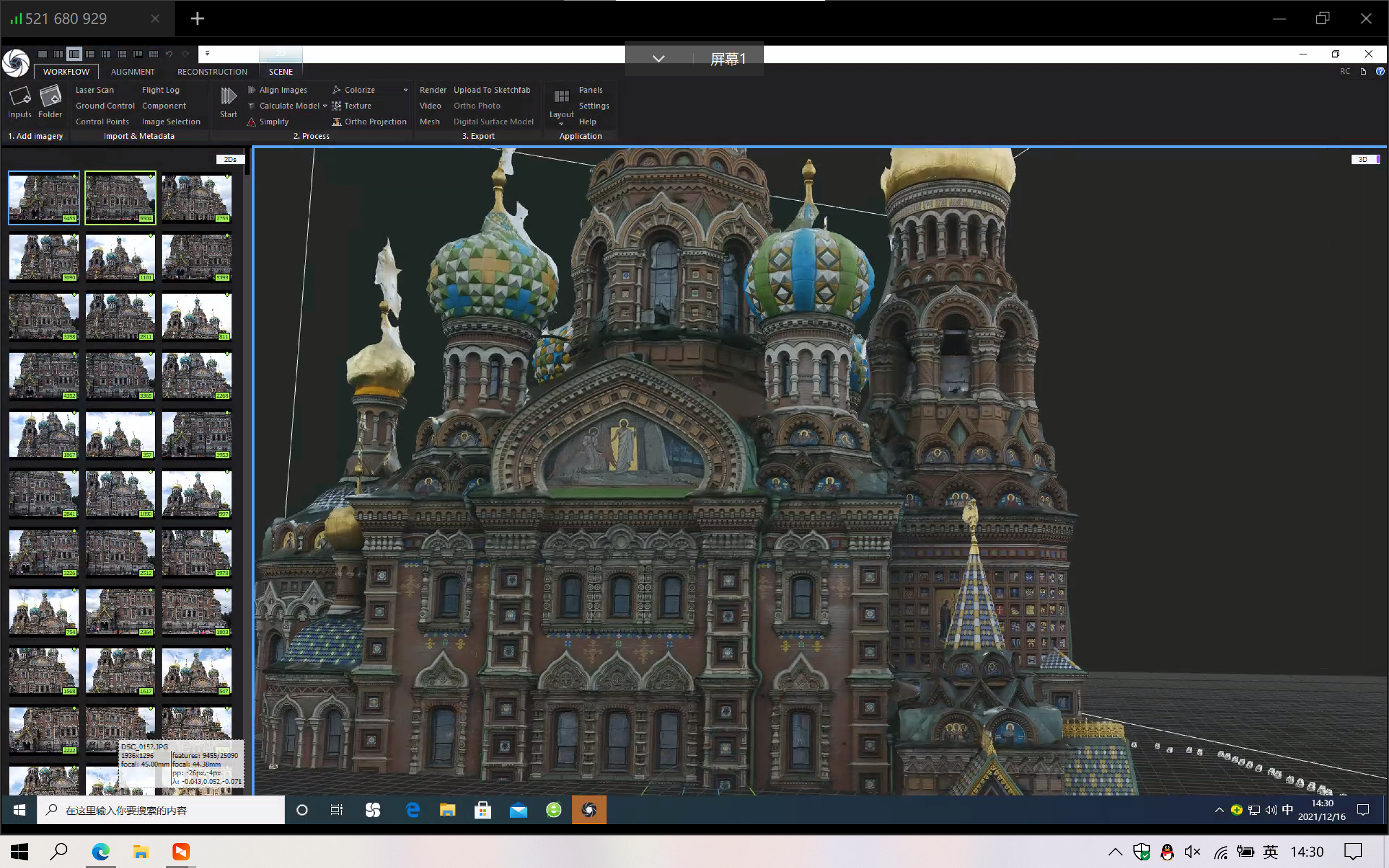
有了纹理后,模型的窗棂、房檐等部件的层次感更佳。
Simplify
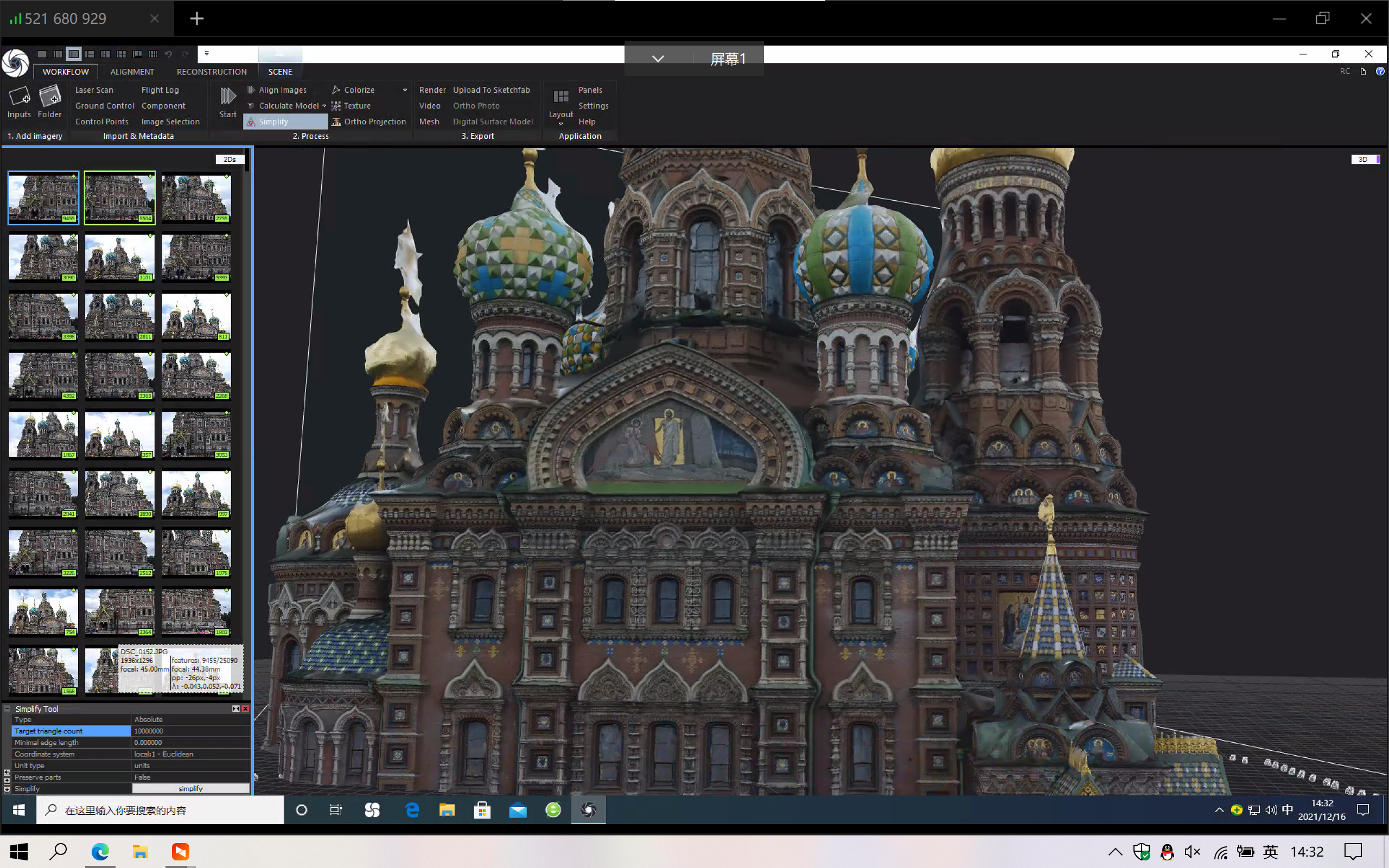
Combine triangles where possible to eliminate complexity and speed up computation for various operations.
尽可能减少三角面片数量,使连接处平滑,减小计算量。
High Detail
考虑更多细节后,右侧塔尖的轮廓大致显现,但塔顶出现点云丢失,初步分析原因是重建算法在优化处理时,将该部分点云同 反光/云 产生的点云一同删去。
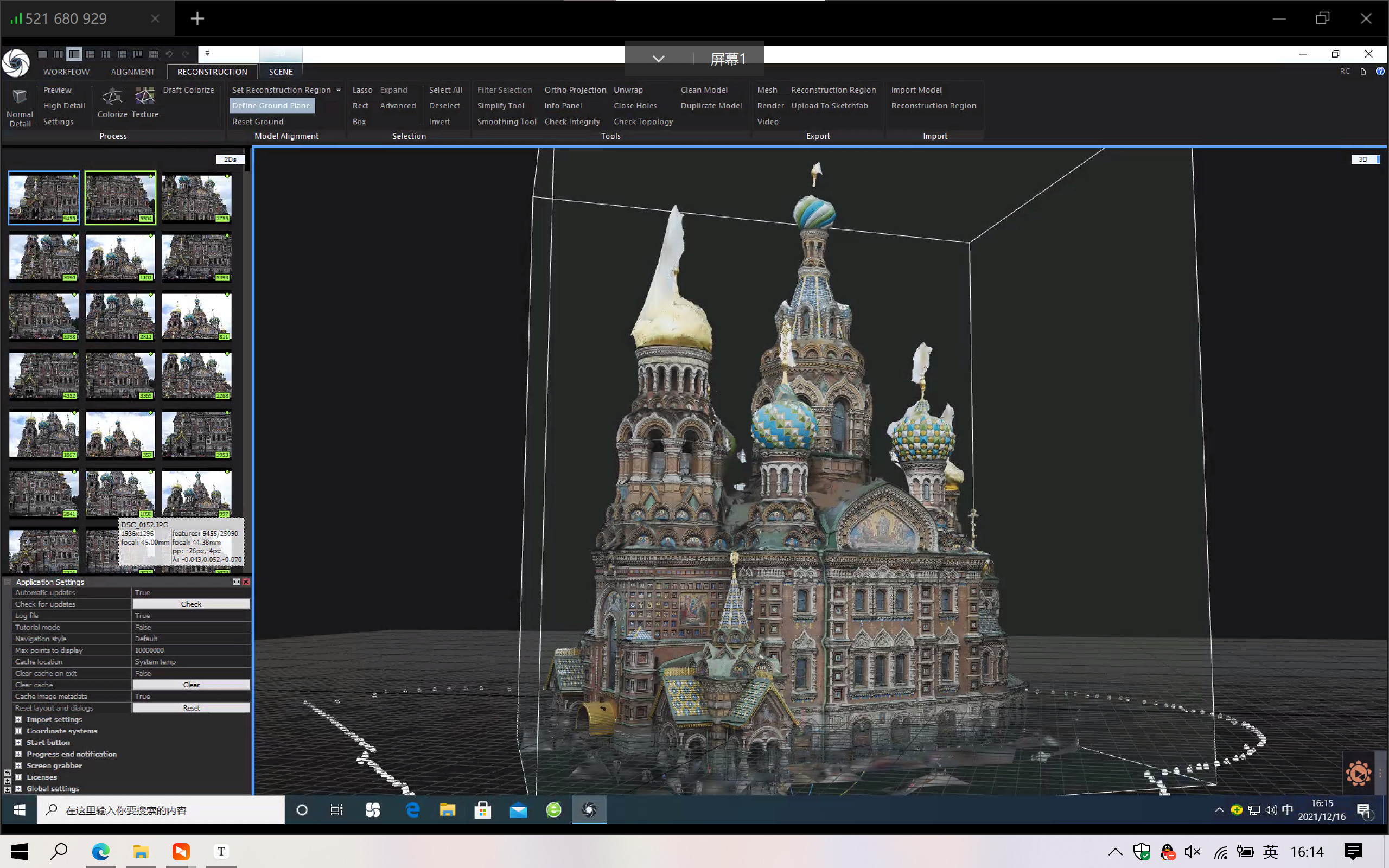
Define Ground Plane
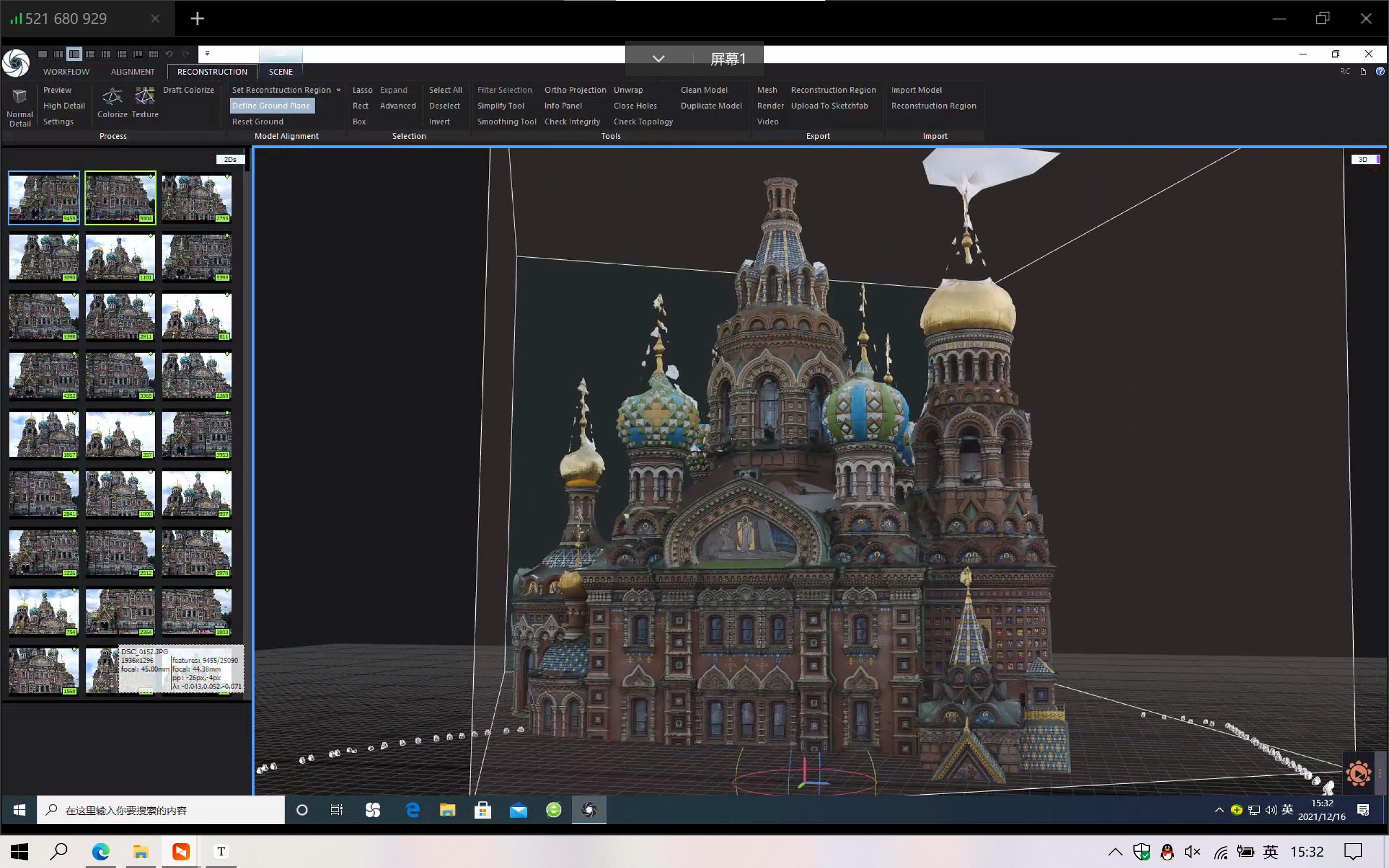
对模型进行旋转,从多个角度观察模型。旋转后发现右侧塔尖仍被干扰(High Detail结果中此部分被限制在框选区域外侧,从而不显现)。
Smooth
Before:
After:
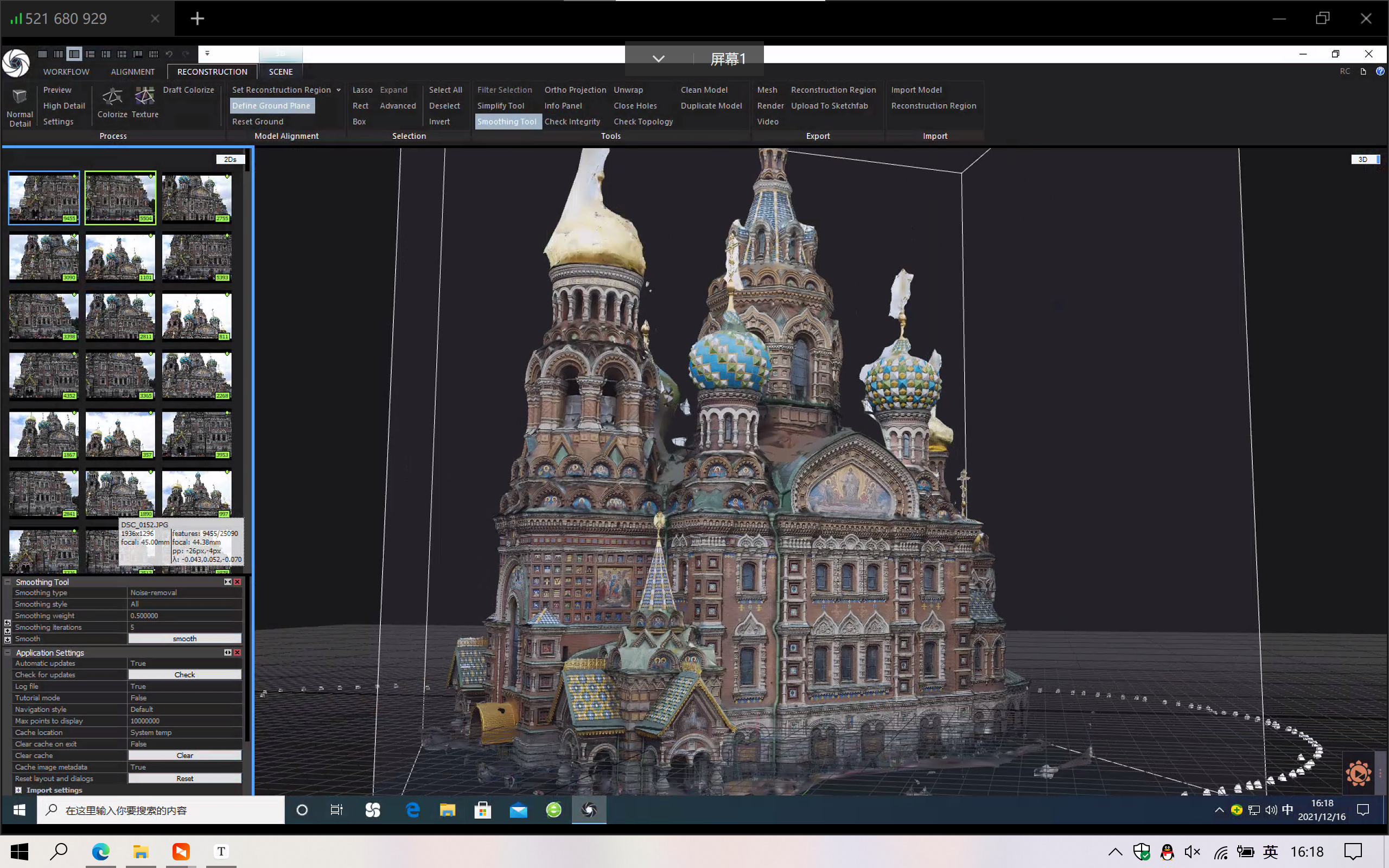
进一步优化模型。
Check
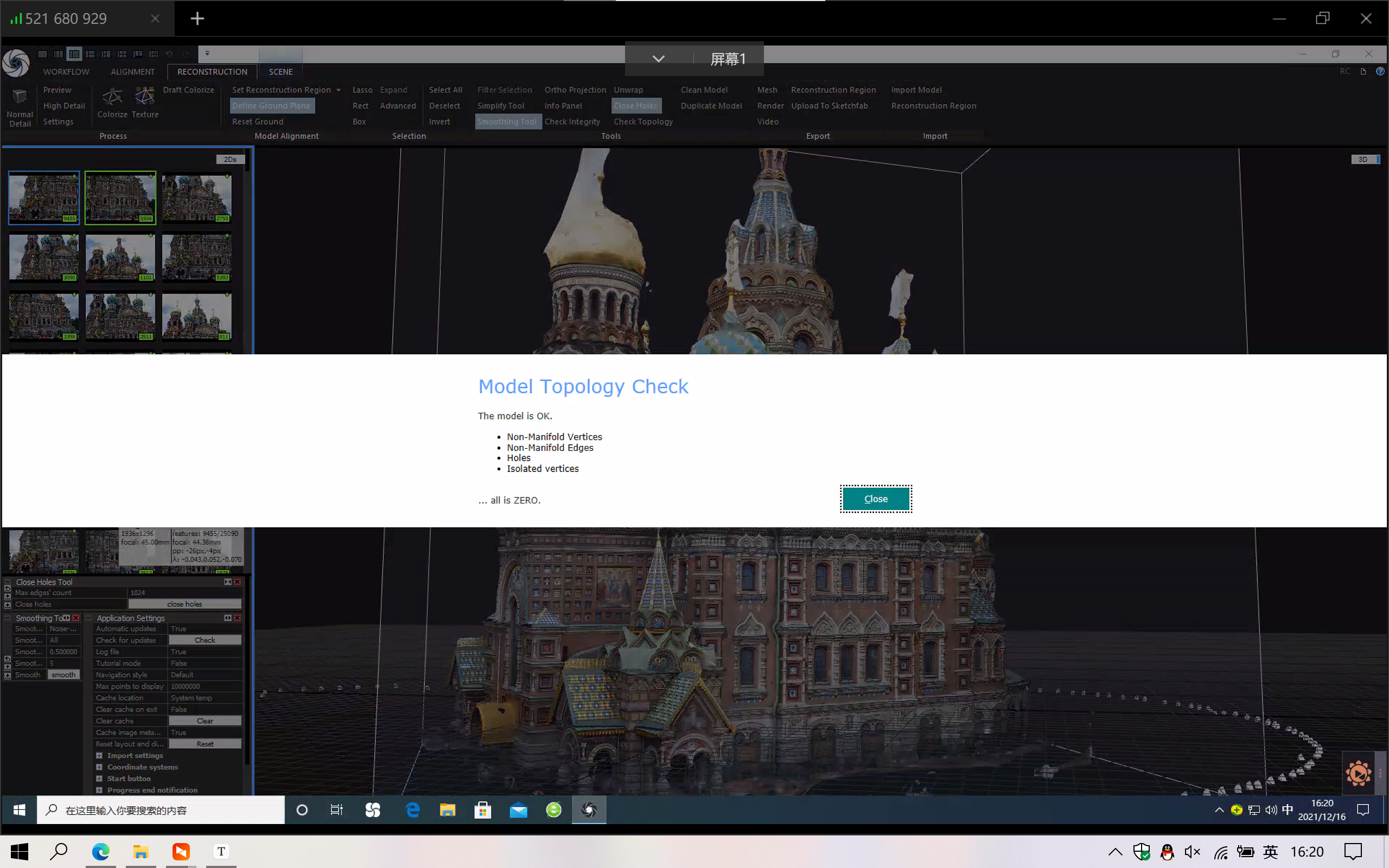
对模型的拓扑结构进行检测,未发现问题。(若发现问题可选择close hole等选项卡进行修补完善)
Export

渲染出图,这里仅导出为png形式(其它形式的导出结果不便于展示),根据实际需要可选择导出形式。
原始数据
Church:
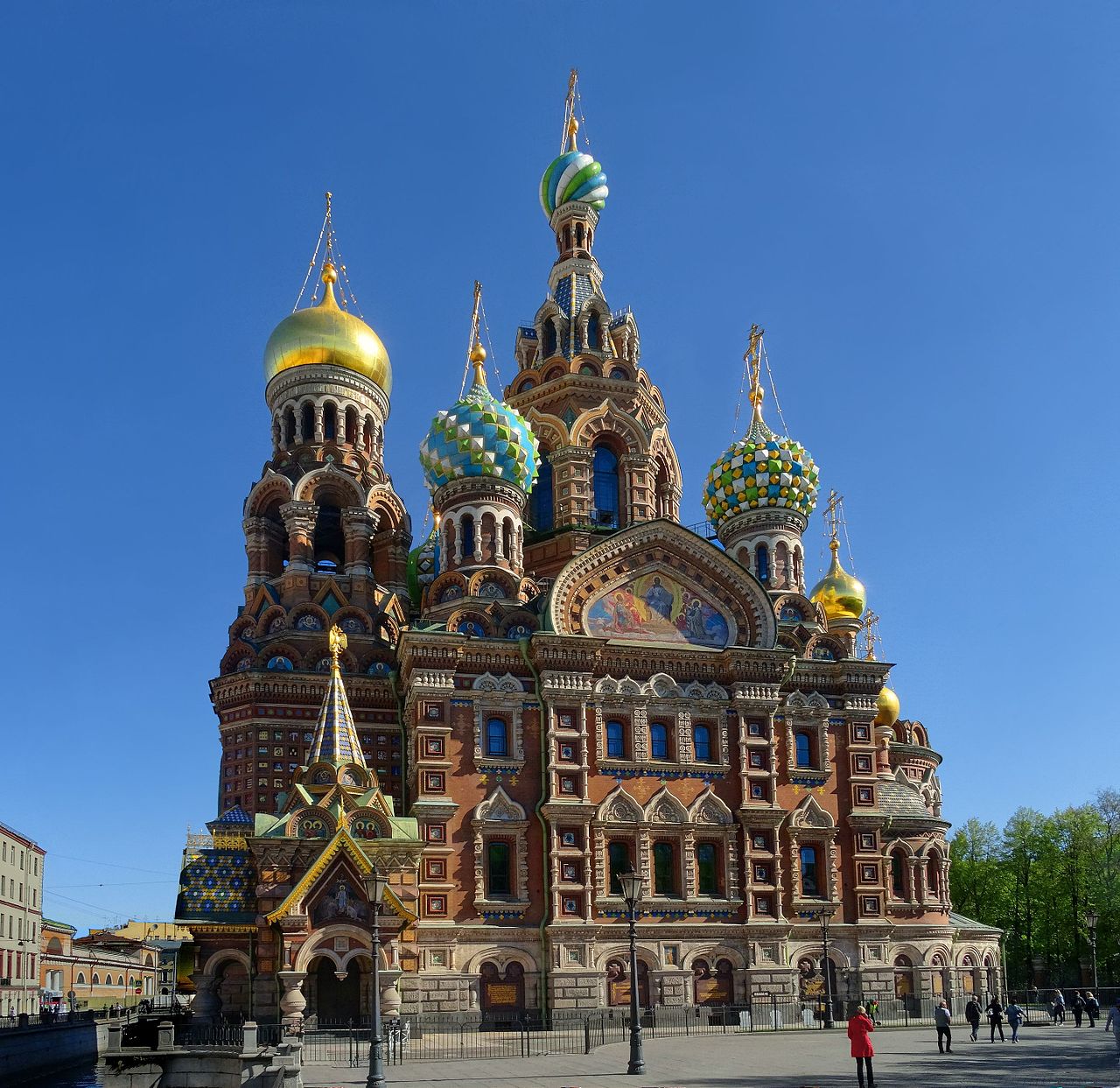
数据集来自:Carl Olsson (lth.se)
共781张图片,分辨率1936×1296,约493MB。


四、分析对比
处理分析汇总
| Process | Result |
|---|---|
| Align Images | 一方面,数据集较大,从相机位姿可以看出图片是环绕着教堂密集地进行采集;另一方面,图片背景较干净,除了蓝天白云的干扰几乎无其他干扰因素。因此重建效果较好。 |
| Normal Detail | 进一步进行稠密重建时,几乎在建筑物的每一个塔尖处都出现了变形。从原图可以发现塔尖处的十字架和铁索较细,且为金属材质,易反光,图片环境光照较强加剧了反光现象,使之变形。 |
| Colorize | 受限于重建点云密度,色彩锐利度不足;未导入光照信息,色彩也不如原图明艳。 |
| Texture | 模型细节“更加”精细,但由于先进行Normal Detail后模型已经具有一定纹理,肉眼无法分辨此步骤前后的差别。 |
| Simplify | 模型简化后(约减少一半三角面片数),可以明显感受到模型变得粗糙。 |
| High Detail | 即便在Simplify后,仍花费约40min进行重建,未Simplify的Normal Detail仅需5min左右。但High Detail解决了塔尖处模型畸变的情况,虽然在塔尖处有部分信息缺失,但整体形状与原图相符,且还原了部分十字架与铁索,因此猜测High Detail会对光线效果进行更多的计算。 |
| Smooth | Smooth后的模型在建筑物的部分边缘处有更好的表现。 |
数据要求分析
手动采集数据后,发现建模软件对重建数据有较高要求。

87张图片,像素4608×3456,重建结果:
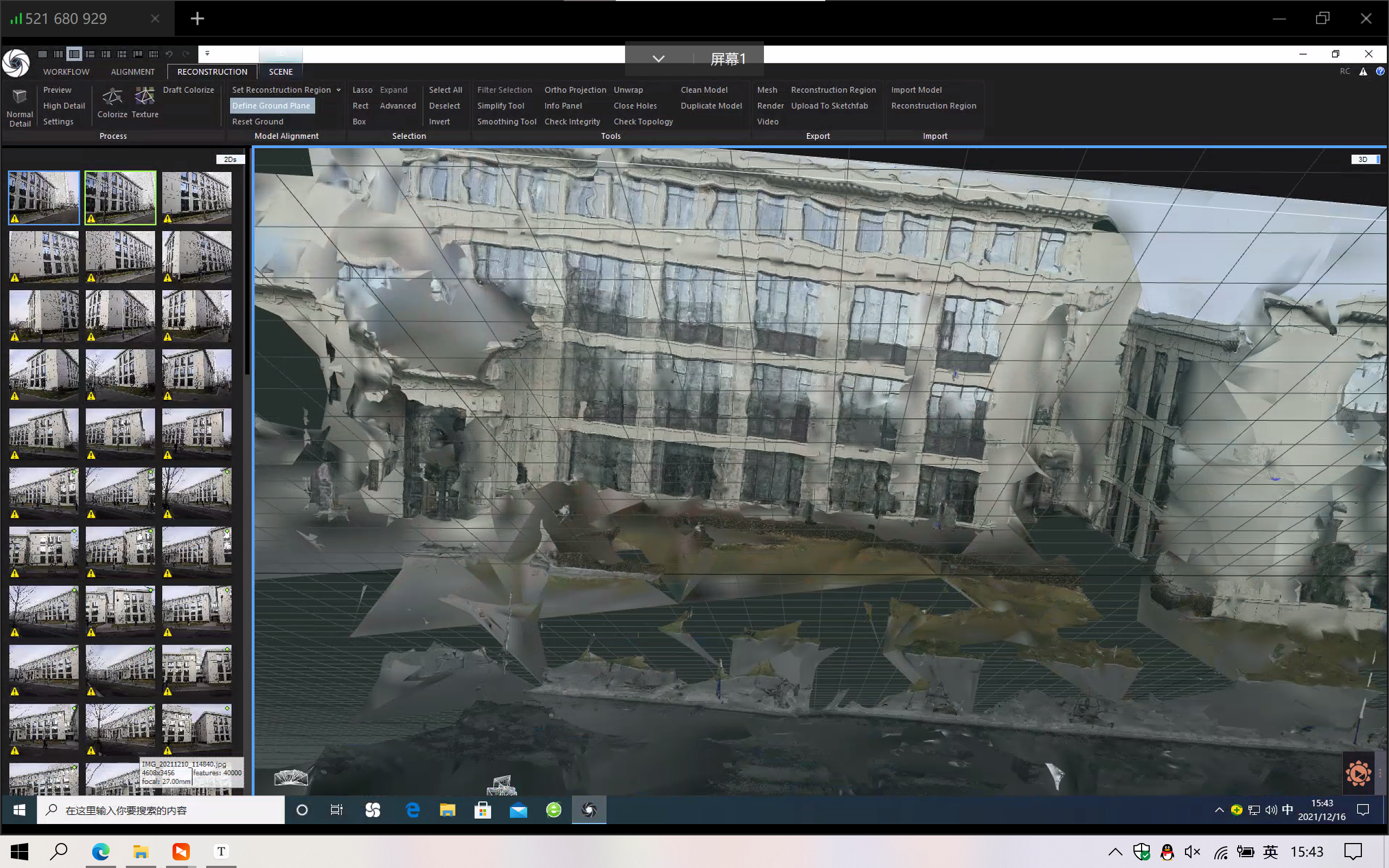
- 普通手机相机不含depth信息,影响重建结果。
- 人为进行移步换景式的拍照对被建模物体所在的空间位置有要求,且难以均匀覆盖各个拍摄角度。
- 以上图为例,道路两侧的行道树占据图片大幅画面,建模算法难免受其影响。
- 教学楼各部分颜色、纹理、结构相似,重建时可能信息的映射可能发生错位。相比之下使用数据集中的教堂的结构并不完全对称,且有明显的塔尖特征进行位置匹配,不易发生错位。
横向对比
以之前使用过的Colmap和Meshroom为参照:
| Colmap | Meshroom | RealityCapture | |
|---|---|---|---|
| 操作 | 需要手动调参,逐步提取特征、匹配特征并进行SFM,进行MVS时也需手动处理SFM数据。 | 可进行一键进行SFM+MVS重建。 | 可进行一键SFM+MVS重建,且可分布进行色彩、纹理等处理。 |
| 效果 | 信息丢失较少,点云密集,但色彩与纹理重建效果较差。 | 信息丢失较多,但色彩与纹理重建效果较好。 | 信息丢失较少,点云密集,色彩与纹理重建效果较好。 |
| 界面 | 软件较小,轻量级,支持GUI与命令行。 | 软件较大,支持GUI与命令行,采用图形化模式(流程图)进行进度示意,并可对每一步的数据进行操作。 | 软件较大,支持GUI与命令行,导航栏功能丰富,但旋转与缩放操作较不方便。 |
| 效率 | 相对耗时较短,重建240张图片不到30min。 | 相对耗时较长,重建240张图片约耗时60min。 | 又快又好,耗时短于前两者,重建781张图片耗时40min。 |
| 其他 | 对数据集几乎没有特殊要求,可以处理由不同相机拍摄获得的图片。 | 对数据集有较高要求,数据不符合规范可能无法进行重建。 | 对数据集几乎没有特殊要求,但较好的数据可以获得更好的重建效果。 |
最后附上Colmap和Meshroom介绍:
Colmap:
Colmap is a general-purpose Structure-from-Motion (SfM) and Multi-View Stereo (MVS) pipeline with a graphical and command-line interface.
COLMAP — COLMAP 3.7 documentation
colmap/colmap: COLMAP - Structure-from-Motion and Multi-View Stereo (github.com)
Meshroom:
Meshroom is a free, open-source 3D Reconstruction Software based on the AliceVision framework.
Meshroom Manual — Meshroom v2021.0.1 documentation (meshroom-manual.readthedocs.io)
alicevision/meshroom: 3D Reconstruction Software (github.com)